

近日,在2025年世界机器人大会上
由北京交通大学与中央美术学院联合主办的
第三届机器人艺术与科技融合创新活动
成功举办
展出的各类艺术科技作品
引发广泛关注

与往届的论坛不同,第三届机器人艺术与科技融合创新活动以科技与艺术作品展示和报告的形式进行,并邀请了科学家、艺术家、收藏家、企业家就机器人艺术与科技的融合创新进行深度研讨,探索开辟机器人未来研究的新天地。

刚柔并济:科技与艺术的深度融合

当音乐开启
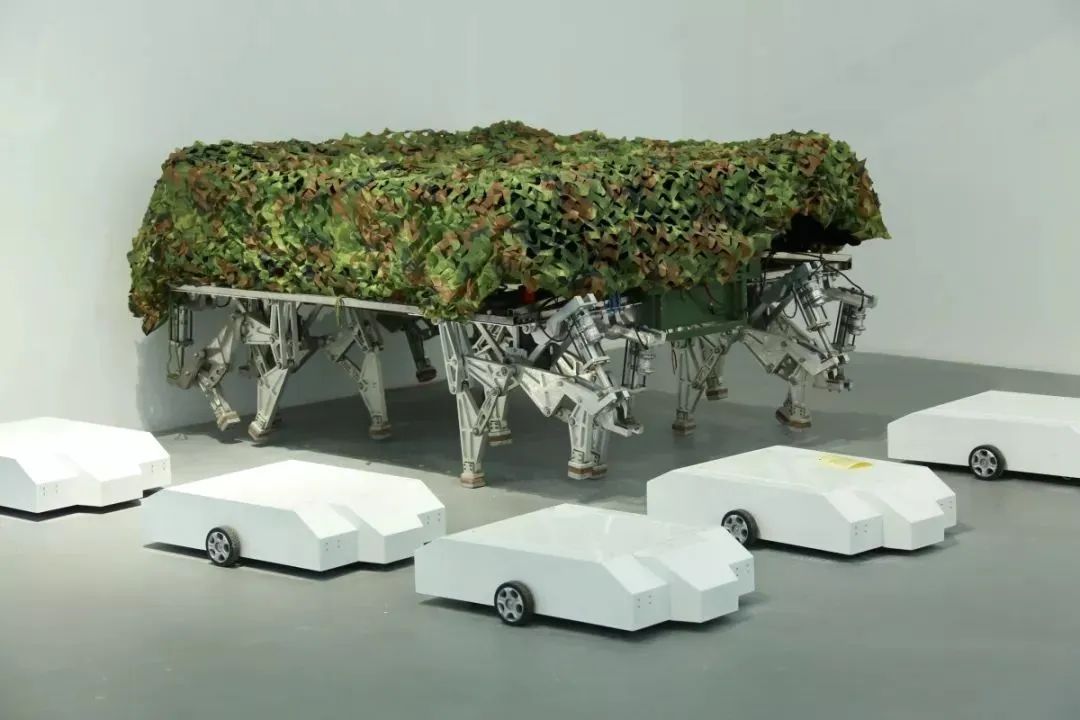
一架庞大的黑色多足机器人走进会场
身穿白裙的舞者在黑色机器人“铁马”上舞蹈
机器人行进时发出的声音似战马奔腾
这是北京交通大学机电学院教授
北京交通大学机器人研究中心主任姚燕安
联合北京舞蹈学院的教授和学生
创作的艺术科技作品《铁马舞者》
营造了机器人与人的和谐共处
刚柔相济的艺术氛围

▲ “铁马舞者”

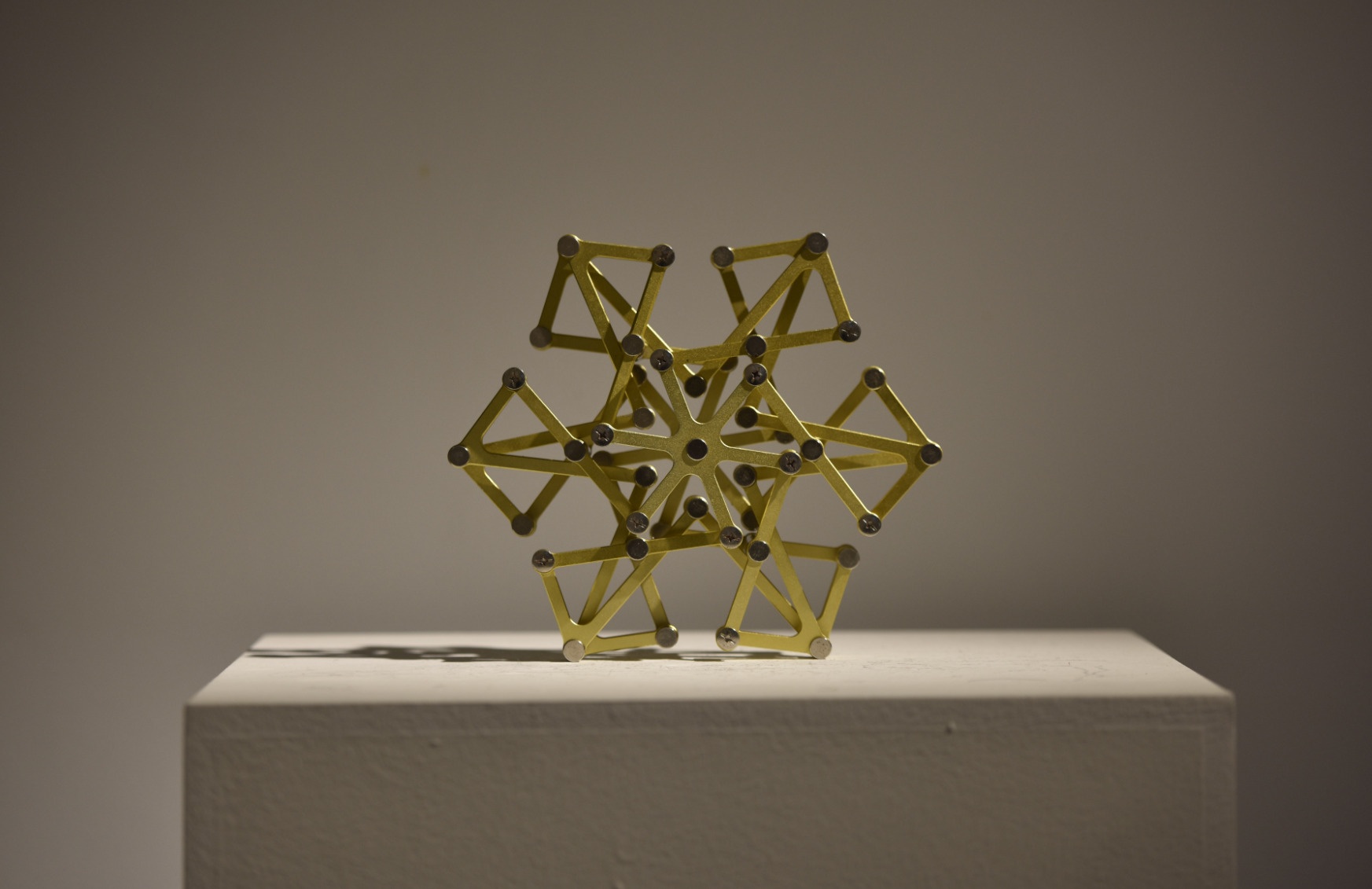
“这些作品都是机器人艺术领域里重要的门类或形式,也是非常具有时代性和代表性的,希望机器人的表演能够给观众带来震撼。”姚燕安在主题为《机器人艺术与科技的融通境界》的报告中介绍了团队多年来在几何机器人方面的探索,包括四面体机器人、六面体机器人、四边形机器人、雪花机器人等。他认为,虽然机器人是利用数学的几何原理、力学原理研发而来,但从美术角度看则是很美妙的图案,有着很高的艺术价值;同时美术作品也可以被制作成机器人,行走起来。

姚燕安将此次展示活动形容为机器人大会上的“独特亮点”。“在和大会组委会讨论时,我们希望提到机器人,不一定都是产业、产品,它不仅帮人类干活、提高生产力,它还会进入到艺术领域、生活领域,可以熏陶人类,使我们感到美好和愉悦,在科学与艺术相融合方面使机器人更好地走向社会。”姚燕安介绍,此次活动主要展示了科学家、艺术家以及学生的设计作品,也邀请各行各业的专家学者探讨艺术和科技如何融合的话题。

▲姚燕安介绍跑得最快的有腿机器人 新京报记者刘洋 摄
“我们希望构建具有灵巧变形、灵活移动特征的几何机器人,培养学生数学家的严谨思维、科学家的创新思维、工程师的实践能力、艺术家的美学情怀以及哲学普世情怀。”
—— 姚燕安创办的几何机器人网站主页宣言
提到高校育人,姚燕安介绍,近年来,北京交通大学和中央美术学院联合开展了教学活动,其中就包括为设计系的学生开设本科课程《动态机械雕塑》,利用机器人技术使雕塑动起来。他希望通过此次的展览展示活动,让社会各界能够了解研究者们在科技与艺术前沿探索中的思考,并听取公众意见,进一步改进作品。

几何机器人的美学世界
提到机器人 你会想到什么呢?
变形金刚?铁臂阿童木?
通通带你看
机器人“大变身”

(动态花卉)这是几何机器人哦~
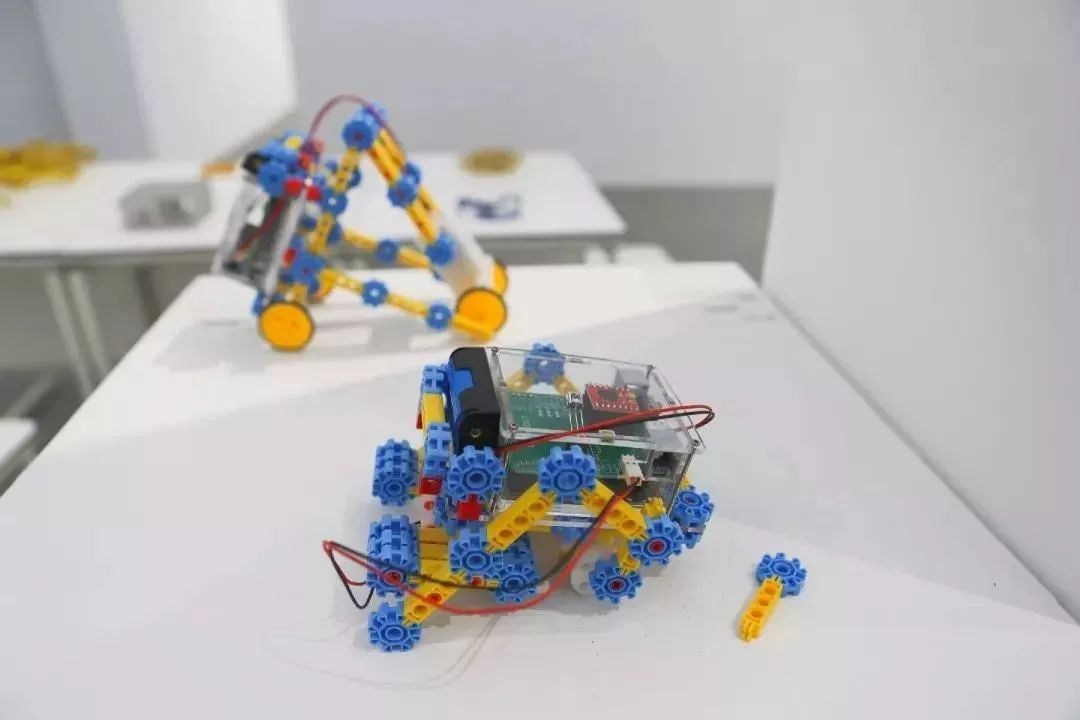
惊叹其奥妙之余 通通也想自己上手试一试
体验形态各异的几何机器人并了解其原理~
十二角中心发散机构
缩放立体结构
除了各种巧妙的缩放变形
它甚至还可以“变”为会奔跑的小动物~


这些几何动物、机械生命、机器人……
体现了科学和艺术的完美融合
不过远不止如此
一起了解姚燕安的“机器人江湖”!
什么是几何机器人?
几何机器人以连杆机构为本体,外形呈现三角形、四边形、四面体、六面体等典型几何形态,通过内部变拓扑和外部变形,能获得缩放、扭曲以及穿越等变形能力,通过加载不同的移动系统,可实现滚动、步行、爬行、滑行等多种移动方式。
这种机器人具备灵活变形、高机动性、高适应力等特征,适用于抢险救援的复杂地形、军事作战的动态地域和星球探测的未知环境等场景。
几何世界里的“变形金刚”
在《三国演义》里诸葛亮发明了木牛流马,“特行者数十里,群行三十里”,为蜀汉十万大军提供粮食。如今,传统意义上的“长脚”两足、多足机器人,搭载有计算机和移动设备的“轮式机器人”和“履带式机器人”,其形象已深入人心。
为了打破常规,姚燕安决定独辟蹊径,在世界机器人江湖独创一派。他提出的几何机器人,是“几何学+机构学”的融合之作。

从本科、博士到博士后,姚燕安在机械工程领域打下深厚的功底。早在十几年前,他就提出“多模式整体闭链连杆式移动系统”的新概念,其本质是将复杂空间连杆机构整体用于构成移动机器人的机械本体,使之具有复杂环境的高度适应能力、良好刚度和低成本控制系统等显著技术优势。
姚燕安最初设计的一个低成本三连杆机器人,就是这一概念的产物。
“从三连杆、四连杆到八连杆,正如中国传统哲学中道生一,一生二,二生三,三生万物的规律,如果按照一套创新设计的方法论,更多更复杂的机器人就可以绵延不绝地开发出来。”中国传统的哲学思维,启发姚燕安创新性地提出几何机器人的概念。
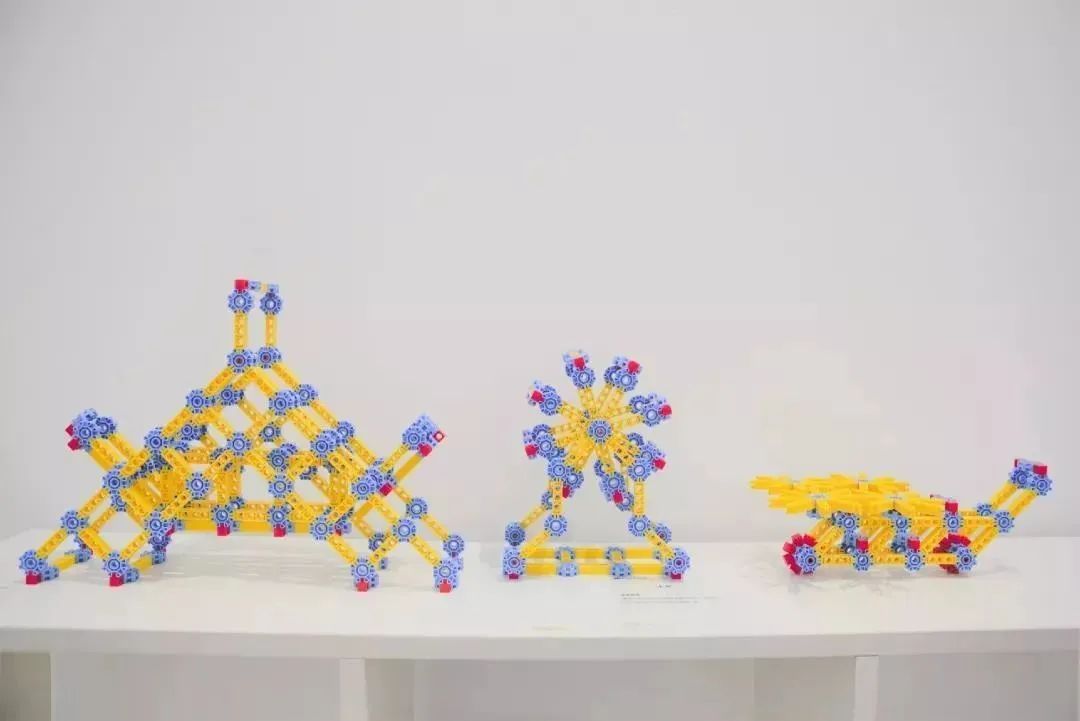
几何机器人在外形上可呈现三角形、四边形、四面体、立方体等典型几何形体特征,以电动机驱动控制后,具有可变外形能力以及折叠、缩放功能,能实现自主滚动、步行、爬行、滑行等多种移动方式,堪称几何世界里的“变形金刚”。
这种机器人不仅具有特立独行的构造,更具备能量强大的“内功”。不信你看:
一个滚动三角形机器人,通过电动推杆控制重心变化,重复倾倒过程可直线移动,如果在底部加装两只脚,还能步行;
一个六边形机器人,借助顶点的转动铰链,拥有变形能力,它可变成三角形、四边形、五边形,甚至能模仿履带方式完成滚动;
一个多模式可重构连杆式移动机器人,在平坦路面上以轮子形态快速滚动,来到松软路面就变形为履带滚动,进入低矮洞穴则似蛇形爬行,而遭遇台阶、壕沟或碎石时又可实现“手脚”攀爬。更令人惊奇的是它还能折叠起来,遇有救援任务便于运输、储藏,甚至投射……

几何机器人的超强越野能力
说起几何机器人的强项,姚燕安颇为自豪。他解释,传统的履带式机器人较为沉重,不够灵活,腿式机器人在复杂路面上不好控制,“我们的几何机器人具有更强的变形能力,遇到不同的地势无需重新拼装,能够快速反应,适应不同的地形地貌。”
姚燕安说,几何机器人因其强大变形功能而具备的极强越障能力,在极端障碍环境中可大显身手,其适用场景包括民用领域抢险救援中严重破坏路面、军事领域的野外作战动态变化地形等,未来它也有希望取代轮式、履带式、腿式等地面移动机器人,在民生、国防安全、国际反恐、航天技术等领域开展相关作业。
在月球等星球进行表面探测,由于地形环境未知或难以精确预知,风险极高,而几何机器人超强的地形适应能力可在这种艰苦环境中大展身手。

几何探索永无止境
科艺交融共创未来
在机器人江湖的征途上
绘就璀璨新篇章!
责任编辑:王作强
初审 :葛纯强
终审 :邓永军 张术秋
版权与免责声明:(1)本网转载内容仅为信息传递,并非商业用途,(2)本网所转载文章内容,并不代表本网观点。 (3)本网转载文章如涉及作品内容、版权等相关问题,请在壹周内通过电子邮件与本网站联系,邮箱:zy91370786qq.com 我们将在第一时间对内容进行删除
Copyright @ 2020 www.zgjyjdw.cn All Rights Reserved
《教育新闻报》官方网站:http://www.zgjyxwb.com
教育监督网 官方网站:http://www.zgjyjdw.cn
广播电视节目制作经营许可证:(京)字第15763号
工信部备案许可证编号:京ICP备15045263号-4
地址:北京石景山区新华社第二工作区